
中学生の皆さんへ
あなたはどんなことに興味がありますか?
コンピュータ,タブレット,スマートフォン,プログラム,情報,電気,電子,ロボット,機械の制御,センサ,工作,模型,ゲーム,ラジコン… こういったものに興味がある中学生の皆さん,その知識や技術をもっと深め広げたいと思いませんか?
自分が興味を持って学んだ知識や技術が,将来の自分の仕事につながり,社会の役に立つならば,幸せな人生が送れることでしょう。 その道を開いてくれるのが電子制御工学科です。
電子制御工学科では,機械工学,電気電子工学,情報工学といった分野に共通する基礎学力を重視した教育を実践しています。 多くの演習を通して数学,物理の確かな学力を身に付け,多くの実験を通して力学,電気電子回路,情報処理などの実践力,応用力を身に付けます。
その結果として卒業生の進路は,機械工学,電気電子工学,情報工学だけでなく,航空工学,物理学など多くの分野に渡り,社会に出てからも活躍しています。
クローズアップEC【Vol.018】
特集:R07年度卒業研究,表彰テーマの紹介
金賞
「ドナー・アクセプタ型共役ポリマーを用いた有機トランジスタの作製と評価」
長谷川 柊太(有機光デバイス研究室/指導教員 皆川)
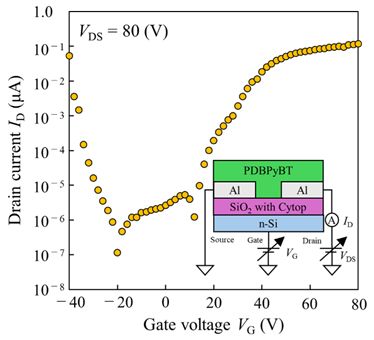
本研究では,PDBPyBTという有機半導体材料を用いたトランジスタの作製と評価を行った。 有機トランジスタは,軽くて薄く,曲げることもできるため,将来はウェアラブル機器や人工皮膚のようなやわらかい電子機器への応用が期待されている。 本研究では,このPDBPyBTを用いてnチャネル型有機トランジスタを作製し,電気の流れ方を調べた。 その結果,PDBPyBTを用いた素子が,電圧によって電流を制御できるスイッチのような働きを示すことが確認された。 図は,その動作を示した結果である。 また,本研究では,成膜後の乾燥温度が素子の特性に与える影響についても調べた。 その結果,乾燥温度が高いほど電流が小さくなる傾向が見られた。 これは,乾燥のしかたによって材料の並び方や膜の状態が変わり,電気の流れやすさに影響したためと考えられる。
本研究により,有機トランジスタの性能は材料だけでなく,作り方によっても大きく変わることが分かった。今後は,よりよい条件を探るとともに,別の動作をする素子の作製にも取り組み,将来のやわらかい電子回路の実現につなげる予定である。
銀賞
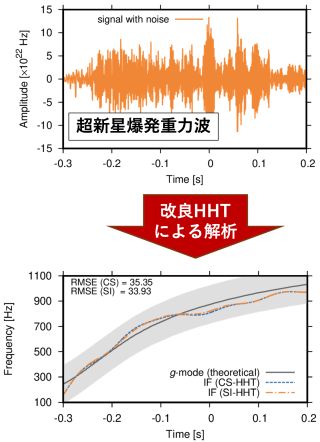
「Steffen補間を⽤いた改良Hilbert-Huang変換による超新星爆発重⼒波の解析」
大瀧 はるか(データサイエンス研究室/指導教員 酒井)
近年,連星中性子星合体やブラックホール連星合体といった天体現象から重力波が観測されており,建設予定の第3世代重力波観測器により,コア崩壊型超新星爆発(CCSN)に伴う重力波の検出が期待されている。 CCSNから放出される重力波には,原始中性子星(PNS)の振動に由来するg-modeが含まれており,その周波数はPNSの質量や半径といった物理量と密接に関係している。 この関係はUniversal Relationと呼ばれ,g-mode周波数から物理量を導出できることから,重力波観測によって超新星爆発の仕組みに関する知見を得る手法として重要視されている。
本研究では,重力波信号からg-mode周波数を抽出し,PNSの物理量であるM/R2の時間発展を推定する。 周波数抽出にはHilbert-Huang変換(HHT)を用いる。 HHTは非線形・非定常信号に適した解析手法であり,経験的モード分解(EMD)によって信号を複数の固有モード関数(IMF)に分解した後,Hilbert変換により瞬時周波数を求める。 本研究では,EMDにおける補間法を従来のCubic SplineからSteffen補間へ変更することで手法の改良を行い,推定精度への影響を検証した。
解析には数値シミュレーションによって生成された重力波波形を用い,検出器ノイズを付加した条件で評価を行った。 推定精度は先行研究と同様にRMSE(Root Mean Squared Error)で評価した。 その結果,Cubic Splineを用いたCS-HHTとSteffen補間を用いたSI-HHTは,g-mode周波数および物理量M/R2の推定においてほぼ同等の精度を示した。 特にIMFの合成条件を適切に設定することで,SI-HHTはCS-HHTと同程度の性能を達成した。 また,Steffen補間は局所的な情報に基づいて傾きを決定するため,Cubic Splineに比べて計算量が少ないという利点を持つ。 以上より,本研究はSteffen補間を用いた改良HHTが,精度を維持したまま計算効率を向上できる可能性を示した。
【指導教員による中学生向けのまとめ】
- 「重力波」というのは,非常に重い天体が爆発したり衝突したりすると周囲の「時空」そのものが歪んでそれが波として伝わっていく現象のことです。 重力波の形を解析することで,その天体現象について,光や電波などの他の手段では見えない内側の現象まで調べられるようになると期待されています。
- この研究では「超新星爆発」という天体現象による重力波を「Hilbert-Huang変換(ヒルベルト-ファン変換)」という手法で解析して,超新星爆発のメカニズムを解明するための手助けになるかもしれないパラメータを推定するというシミュレーションを行っています。 特にこのHilbert-Huang変換の中で「Cubic Spline」という処理が行われているところをより高度な「Steffen補間」というものに置き換えて改良することで,性能が向上するかどうかを調べています。
- 結果として,今回の改良をすることで,精度を維持したまま計算効率を高められそうだということが分かりました。
銅賞
「幾何学的手法と深層学習によるブレッドボード上の配線パターン認識」
松永 翌(色彩情報処理研究室/指導教員 上村)
電子回路の試作において,ブレッドボードは利便性が高い反面,回路図として記録しない限り他者との共有や再利用が困難である。 ここで,回路構成を記録する手法としてネットリストが存在する。 ネットリストとは,素子の接続情報をテキスト形式で記述したファイルであり,これを共有することでE-CADなどにより自動的に回路図を生成することが可能となる。
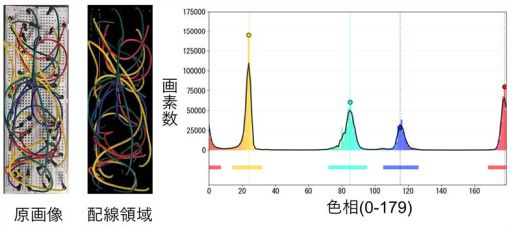
そこで本研究では,ブレッドボード上に組まれた回路画像をネットリストへ変換するシステムを開発した。 本システムは以下の4手順で画像から回路情報を読み取る。
- 物体検出モデルYOLOを用いて素子認識を行う。
- HSV色空間を用いた画像処理により,色ごとに配線を追跡する。
- 入力画像からブレッドボードの四隅を検出し,既知のモデル座標を射影変換して各穴の座標を特定する。
- 検出した素子位置から最も距離の近いブレッドボードの穴を接続先としてネットリストを作成する。
特別賞(学会発表を行った学生)
- 「⼀次元残差ニューラルネットワークを⽤いたリングダウン重⼒波のパラメータ推定」,稲⽥ 琉⽃
- 「Steffen補間を⽤いた改良Hilbert-Huang変換による超新星爆発重⼒波の解析」,⼤瀧 はるか
- 「姿勢推定AIを用いた転倒リスクの高い歩行動作の特徴抽出」,品田 聖翔
- 「⾦属部品の⾃動外観検査に向けた光源と連動した物体検出AIの開発」,清⽔ 凜哉
- 「Estimation of Pain Response to Thermal Stimuli Using fNIRS」,古川 聖也
- 「Analysis of relationship between reception movements and sports vision in volleyball」,小久保 海梛
- 「Development of a shiphandling support system using virtual grid」,吉川 修一
- 「Investigation of Optimal Camera Placement for Video Analysis in Volleyball Games」,山下 拓人
- 「Estimation of Anger States Using Biosignals」,野本 楓太
ひとこと
このサイトは「Webアクセシビリティー」に配慮し,HTML Living Standard (HTML5),スタイルシート (CSS3) に完全対応させて作成しております。 これらに対応したWebブラウザでご覧いただいたときに最適な表示になるようページを構成しております。 未対応のブラウザでもご覧いただけますが,一部の表示が崩れることがありますので,ご了承ください。
「Web アクセシビリティー」とは,身体に障害をお持ちの方や視力・聴力が低下された方でも,ご覧いただけるように Web ページを作成する指針のことです。 2004 年 6 月には日本工業規格(JIS X 8341-3:2004)として制定されました。