Design safe, secure and reliable system!
Control Engineering Laboratory
小型船舶による救急患者搬送用防振架台の開発
研究背景
日本列島各地で大地震が予想される近年,離島からの救急患者搬送体制の確立が急務となっている.その搬送方法のひとつとして,船舶の利用が考えられる.船舶による救急患者搬送には大きく分けて2つのケースが考えられる.1つは,収容人数が多く設備の整った中・大型船舶を利用して,被災地から被災地外の災害拠点病院等に搬送を行う場合である.もう1つは,収容人数は少ないが,喫水が浅く港以外でも離着岸が容易な小型船舶を利用した被災地内医療機関に搬送を行う場合である.小型船舶による救急患者搬送では,搬送時の船体振動によって生じる患者への負担が問題となる.小型船舶は中・大型船舶のように船体振動そのものを低減するフィンなどを装備することは稀であり,患者に伝わる振動を低減する設備である防振架台が必要不可欠となる.高規格救急車では既に防振架台が搭載されているが,対象とする振動の振幅,周波数を考えると流用は困難と考えられる.そのため本研究室では小型船舶用の防振架台の開発を行っている.
トリリニア型ばね機構
トリリニア型ばね機構は,本研究室で考案された「トリリニア型弾性特性」を実現するばね機構である.「トリリニア型弾性特性」は,患者の体重を支持しつつ平衡状態で低弾性を実現するバイリニア型弾性特性に,オーバーストローク時のショックを吸収するヘルパ機能を追加した特性である.通常ストローク行両端に設けたヘルパ機能により,ストローク限界に達した場合に発生する急激な加速度の発生を抑えることが可能となる.更に,本研究室で製作した「トリリニア型ばね機構」は引張ばねを用いることで,全高を抑えることが可能となる.
ステアバイワイヤによる小型船舶用電子制御操舵システムの開発
研究背景
近年,日本の海域内でのプレジャーボート等の小型船舶の海難事故件数が増加傾向にある.これはマリンレジャーの急速な普及によって初歩的な知識,技能の不足した操船者が増加したためだと推測される.海難事故の発生原因は気象・海象の急激な変化の他,機関の整備不良,不適切な操船,見張り不十分といった人為的要因が挙げられる.そのうちの一つである「不適切な操船」を誘引する主なものとして二つの要因が挙げられる.一つ目の要因は,船体に作用する非線形流体力が生み出す複雑な操縦性である.二つ目の要因は,ユーザインタフェースの操作性である.現在の小型船舶の操舵系は手動式油圧操舵機構が主流である.この手動式油圧操舵機構の特徴は反力感が乏しい状況があり,全舵輪回転数自動車に比べて4から7回転と比較的大きい.そのため,操船者にとって舵輪回転角と舵角の把握,舵輪反力からの船体運動の推測が容易ではなく,良好な操作性とは言い難い. 以上の複雑な操縦性や良好とは言い難い操作性に対して,熟練操船者は,航行状況の変化に対する適切な操船を長年の経験で体得している.一方,経験の浅い操船者は,例えば危険回避といった緊急時に舵を切り過ぎるなどして,航行状況によっては転覆を起こすなど,状況に応じた操船を誤る可能性が高い. そこで本研究室では,経験に依らず安全性・快適性がともに高い操船性が得られる電子制御操舵システムの実現を目指している.その第一段階として,簡易操船シミュレータNautisを用いて,操縦性,旋回応答の分析,旋回メカニズムの解析をするとともに,操作性の評価方法について検討している.
操船シミュレータ

本研究室で開発した操船シミュレータは,ソフトウェアによる操船シミュレーション環境に,ヘルムポンプと手動式油圧操舵機構をハードウェアシステムとして組み入れたHILS(Hardware In the Loop Simulation)を構成している.操船シミュレーションソフトウェアには,VSTEP社“NAUTIS”を使用しており,船体の6自由度運動などのシミュレーションデータをリアルタイムで出力可能である. 手動式油圧操舵機構には日発テレフレックス社ヘルムポンプNE1073-00,油圧シリンダNE1009-00を使用している.ヘルムポンプの全舵輪回転数は,約5.4回転である.舵に取り付けられたポテンショメータによって実舵角が検出される.検出された実舵角信号は,舵角計,シミュレーションPCへと送信される.スロットルレバーから入力されたプロペラ回転数信号もシミュレーションPCへと入力され,シミュレーションソフトウェア“NAUTIS”によって船体運動が計算される. その計算に基づき,3台のディスプレイから構成されるシミュレーションスクリーンに,操縦者視点からの船体運動の挙動が描写される.これらにより,安全面,再現性の高い模擬実験を行うことが可能である.
画像情報のみを利用したアンダーハンドパスの動作解析
研究背景
アンダーハンドパスの習得は初心者にとって非常に困難であり,長期間に渡る反復練習を必要とする.このパス動作をバイオメカニクスの観点から解析し,力のかけ方や発生のタイミングなどを提示できれば,パス動作の習得も容易である. 一般に人間の動作を解析する際は,ビデオカメラやフォースプレート(床反力計)を用いて行われる.ビデオカメラからの画像情報より,各関節の位置・角度を得て,フォースプレートより人体に加わる外力として床反力を得る.それらの測定値から,人体の剛体モデルを利用して関節モーメントを求め,動作解析を行う.ただし,フォースプレートの導入には大変なコストが掛り,またフォースプレート上でしか計測が行えないため,その測定範囲に制約があることが問題である.そこで本研究では,フォースプレートを用いない解析方法として,人体に加わる外力をアンダーハンドパスの前腕とボールとの衝突に着目した衝突反力とした,低コストで可搬性の高い動作解析方法を提案する.提案する動作解析方法の妥当性を検証するために,腕部と体幹部の上半身のみを模擬した2リンクのパス実験装置を製作した.ボールの運動量の変化から求めた衝突反力を用いて推定した関節モーメントの値と,バネが関節に与えるトルクとを比較することで,提案する解析方法の妥当性を検証する.
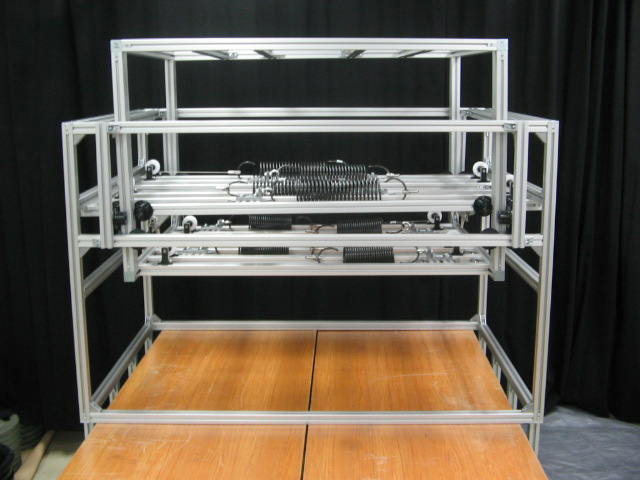
アンダーハンドパス・2リンクシミュレーター
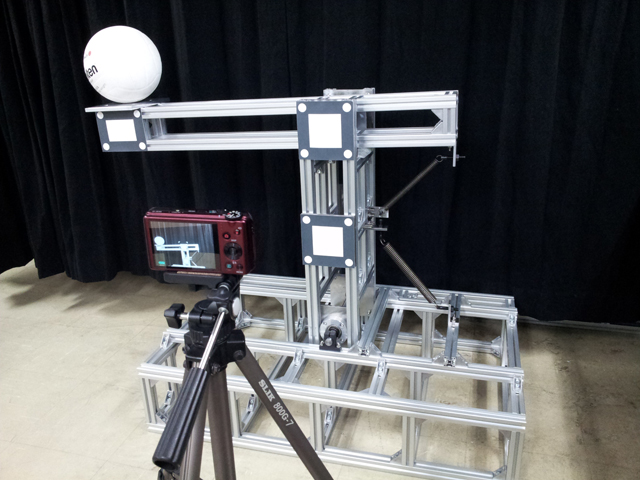
各リンクはそれぞれ人体の腕部と体幹部を模擬し,各リンク間に設置した引張ばねによって動作する.平衡状態から適当な初期姿勢を与えることで,引張ばねによる弾性力が各リンクを動作させる関節トルクとして作用する.
Copyright (C) Control Engineering Laboratory, National Institute of Technology, Nagaoka College. All Rights Reserved.